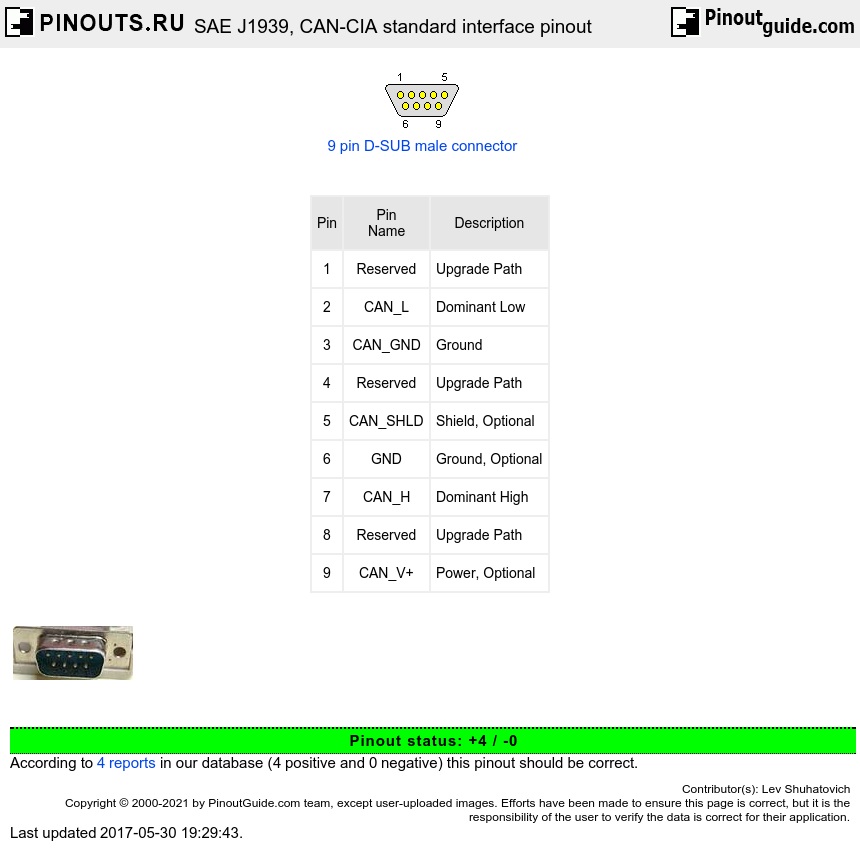


| Pin | Pin Name |
Description |
| 1 | Reserved | Upgrade Path |
| 2 | CAN_L | Dominant Low |
| 3 | CAN_GND | Ground |
| 4 | Reserved | Upgrade Path |
| 5 | CAN_SHLD | Shield, Optional |
| 6 | GND | Ground, Optional |
| 7 | CAN_H | Dominant High |
| 8 | Reserved | Upgrade Path |
| 9 | CAN_V+ | Power, Optional |
Controller Area Network (CAN) is a broadcast, differential serial bus standard, originally developed in the 1980s by Robert Bosch GmbH, for connecting electronic control units (ECUs). CAN was specifically designed to be robust in electromagnetically noisy environments and can utilize a differential balanced line like RS-485. It can be even more robust against noise if twisted pair wire is used. Although initially created for automotive purposes (as a vehicle bus), nowadays it is used in many embedded control applications (e.g., industrial) that may be subject to noise.
Bit rates up to 1 Mbit/s are possible at network lengths below 40 m. Decreasing the bit rate allows longer network distances (e.g. 125 kbit/s at 500 m).
The CAN data link layer protocol is standardized in ISO 11898-1 (2003). This standard describes mainly the data link layer, composed of the Logical Link Control (LLC) sublayer and the Media Access Control (MAC) sublayer and some aspects of the physical layer of the OSI Reference Model. All the other protocol layers are left to the network designer's choice.
 correct
correct incorrect
incorrect